Оборудование ЛИРС
|
|
Мобильный робот «Сервосила «Инженер» Разработан российской компанией «Сервосила» для поисково-спасательных операций при природных и техногенных катастрофах, а также для проведения технических и саперных работ. Сотрудники ЛИРС используют робота «Сервосила «Инженер» в рамках реализации научно-исследовательских и прикладных проектов, а также для студенческих дипломных работ по направлению Поисково-спасательная робототехника. |
 |
Робомобиль Unior Робомобиль Avrora Unior производства российской компании Avrora Robotics. Предназначен для разработки и тестирования алгоритмов автономного движения. Оборудован сенсором Kinect, ультразвуковыми датчиками, GPS-приемником и лазерным сканнером (лидаром). Студенты магистратуры изучают работу с Avrora Unior и его симулятором в среде ROS в рамках дисциплины "Прикладные технологии в разработке, проектировании и эксплуатации информационных систем", а также могут выбрать тему научной и выпускной квалификационной работы, связанную с этим роботом. Теоретические основы алгоритмов планирования пути для автономного движения мобильных роботов будут изучены студентами в рамках дисциплины "Автономные робототехнические системы". |
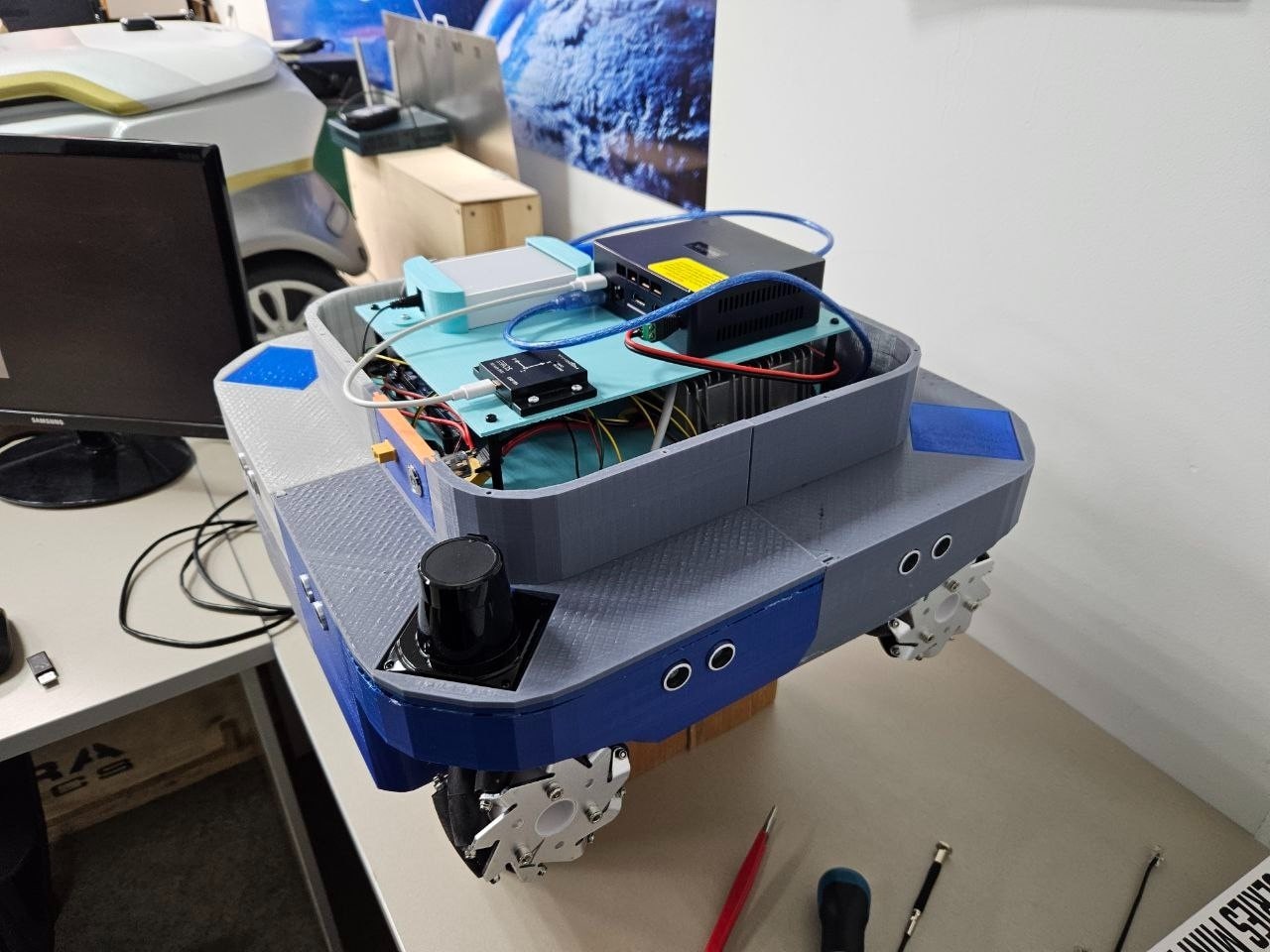 |
Мобильный робот АртБул
Разработан LIRS для отработки алгоритмов построения карты и автономного движения по построенному пути в динамической среде, например, в больницах, на складах или промышленных предприятиях. Мобильный робот оснащен mecanum колесами, что позволяет ему двигаться в любом направление без дополнительного вращения. |
 |
Мобильный робот TIAGo Base Создан испанской компанией Pal Robotics. Предназначен для работы внутри помещений и используется для изучения взаимодействия роботов с людьми и роботов с роботами. |
|
|
Коллаборативные роботы UR3e и UR5e Созданы датским производителем небольших гибких промышленных роботов-манипуляторов Universal Robots. Коботы UR используются как в малых и средних предприятиях, так и в крупных корпорациях в таких отраслях, как автомобилестроение, электроника, металлообработка, фармацевтика и производство. Позволяют автоматизировать однообразные, циклически повторяющиеся процессы в производственных задачах. |
|
|
Промышленные роботы KR 3 AGILUS KR 3 AGILUS - промышленный 6-осевой робот-манипулятор с повторяемостью 0,02 мм, предназначенный для высокоточных задач сборки, перемещения объектов, упаковки и т.д. Программируется с помощью языка KRL. Имеет ряд цифровых и аналоговых входов\выходов, а также Ethernet вход, что позволяет управлять роботом удаленно. В лаборатории имеется 2 робота KR 3 AGILUS. Студенты магистратуры изучают работу с KR 3 AGILUS в рамках дисциплины "Промышленная робототехника", а также могут выбрать тему научной и выпускной квалификационной работы, связанную с этими роботами. Теоретические основы работы манипуляторов будут изучены в рамках дисциплины "Основы робототехники". |
 |
Коллаборативный робот AC10-1300 Коллаборативный робот-манипулятор Эйдос AC10-1300 с 6 степенями свободы для загрузки станков, погрузочно-разгрузочных, сборочных работ, контроля качества. Используется на производствах, когда нужно повысить производительность, заменить людей на сложных или опасных участках, стабилизировать качество продукции и снизить риски травматизма. Применяется для погрузочно-разгрузочных, сборочных работ, загрузка станков/машин, визуального осмотра, контроля качества, исследовательских работ. |
|
|
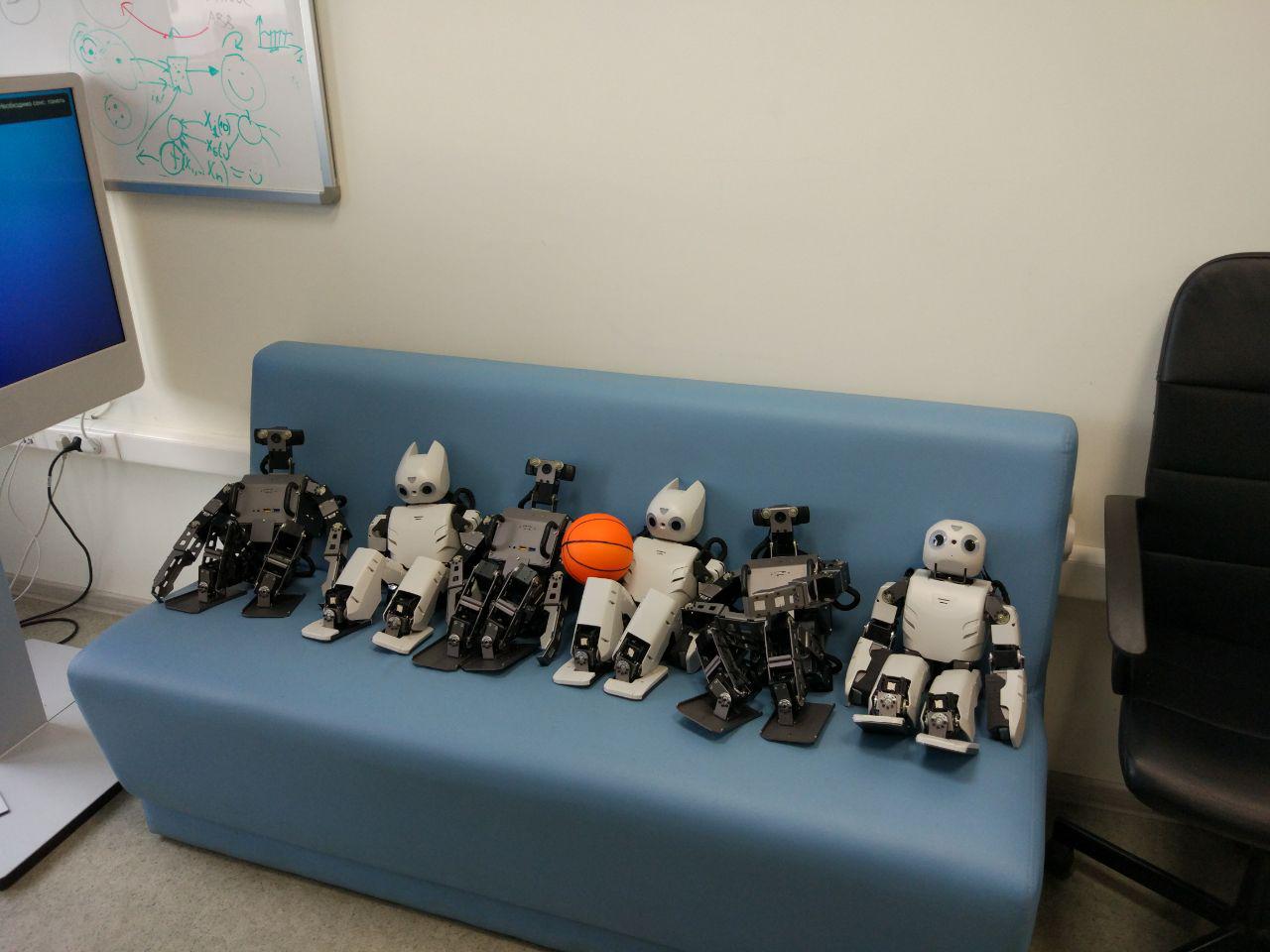
Антропоморфные роботы ROBOTIS-OP-2 и ROBOTIS-OP3 Robotis OP2 (DARwin-OP2) и Robotis OP3 (DARwin-OP3) - новейшие антропоморфные роботы южно-корейской компании ROBOTIS. Эти компактные человекоподобные роботы обладают высокой производительностью и мощными вычислительными способностями, разнообразным набором сенсорных устройств и высокими динамическими характеристиками. Одно из преимуществ роботов ROBOTIS OP2/3 относительно других малоразмерных антропоморфных роботов - это то, что они разработаны специально под ROS для использования различных готовых пакетов экосистемы ROS. Также они имеют свой собственный симулятор в средах Gazebo и Webots. В лаборатории имеется 3 робота ROBOTIS OP2 и 3 ROBOTIS OP3. Студенты магистратуры изучают работу с роботами ROBOTIS и их симуляторами в рамках дисциплины "Прикладные технологии в разработке, проектировании и эксплуатации информационных систем", а также могут выбрать тему научной и выпускной квалификационной работы, связанную с этими роботами. |
 |
Квадрокоптеры DJI Phantom 4 Pro Серия беспилотных летательных аппаратов (БЛА) DJI Phantom является одной из лучших на рынке БЛА потребительского класса. Модель БЛА Phantom 4 Pro была признана лучшей в использовании технологии "избегания препятствий". Будучи последней моделью в линейке Phantom, этот дрон получил самые передовые технологии и камеры в серии. DJI Phantom 4 Pro поддерживает DJI Mobile SDK, что позволяет разрабатывать приложения на мобильных платформах Android и iOS, используя весь доступный функционал дрона. В лаборатории имеется 5 DJI Phantom 4 Pro. Студенты магистратуры могут выбрать тему выпускной работы, связанную с этими БЛА и их групповым взаимодействием. |
 |
Квадрокоптер РХ4 БЛА PX4-ЛИРС был разработан нашими коллабораторами из Брянского государственного технического университета специально по заказу нашей лаборатории. Он построен на базе полетного контроллера с открытым исходным кодом PX4. Робототехническая операционная система ROS дает возможность управлять всеми функциями этого БЛА, используя узел MAVROS. БЛА преднамеренно лишен внешнего корпуса, что позволяет легко производить его модификацию, добавлять датчики и заменять компоненты. Студенты магистратуры могут выбрать тему выпускной работы, связанную с этим БЛА. Для работы с ним потребуются глубокие знания ROS, получаемые студентами в рамках дисциплины "Робототехническая операционная система ROS".
|
|
|
Датчики У лаборатории имеется несколько десятков различных типов датчиков. Например, наиболее часто используемые при решении задач одновременной локализации и картографирования, лазерные дальномеры от компании Hokuyo, позволяют получать 2D карту окружения в радиусе 4 метра с точностью 30 мм. Различные виды камер для решения задач компьютерного и машинного зрения (калибровка камер, обнаружение объектов, построение 3D карты окружения и пр.) включают в себя легкие монокулярные камеры и стерео ZED камеры от Stereo Labs, позволяющие дополнительно к изображению получать данные о глубине сцены. Студенты магистратуры изучают теоретические основы работы с датчиками и решают большое количество практических и лабораторных заданий с ними в рамках дисциплин "Основы технического зрения" и "Датчики робототехнических систем". Студенты будут использовать один или несколько типов датчиков лаборатории при проведении экспериментов во время научной работы над своей выпускной квалификационной работой. |
|
|
Конструкторы LEGO Наборы LEGO EV3 используются в рамках преподавания дисциплин «Основы робототехники» и «Автономные робототехнические системы» для изучения студентами алгоритмов планирования маршрута и навигации мобильных роботов, задач прямой и обратной кинематики, ознакомления с принципами работы датчиков и решения прикладных инженерных задач. Простота работы с данным конструктором позволяет студентам сосредоточиться на прикладном использовании полученного на лекциях теоретического материала, а не зацикливаться на технических сложностях конструирования реальных робототехнических систем. В начале семестра команда из 2-х студентов получает один такой набор в свое полное распоряжение до самого конца семестра, чтобы студенты могли комфортно готовиться к лабораторным и практическим занятиям у себя дома или в общежитии в любое удобное для себя время. |