Робот строит карту - новая прикладная разработка команды ЛИРС ИТИС

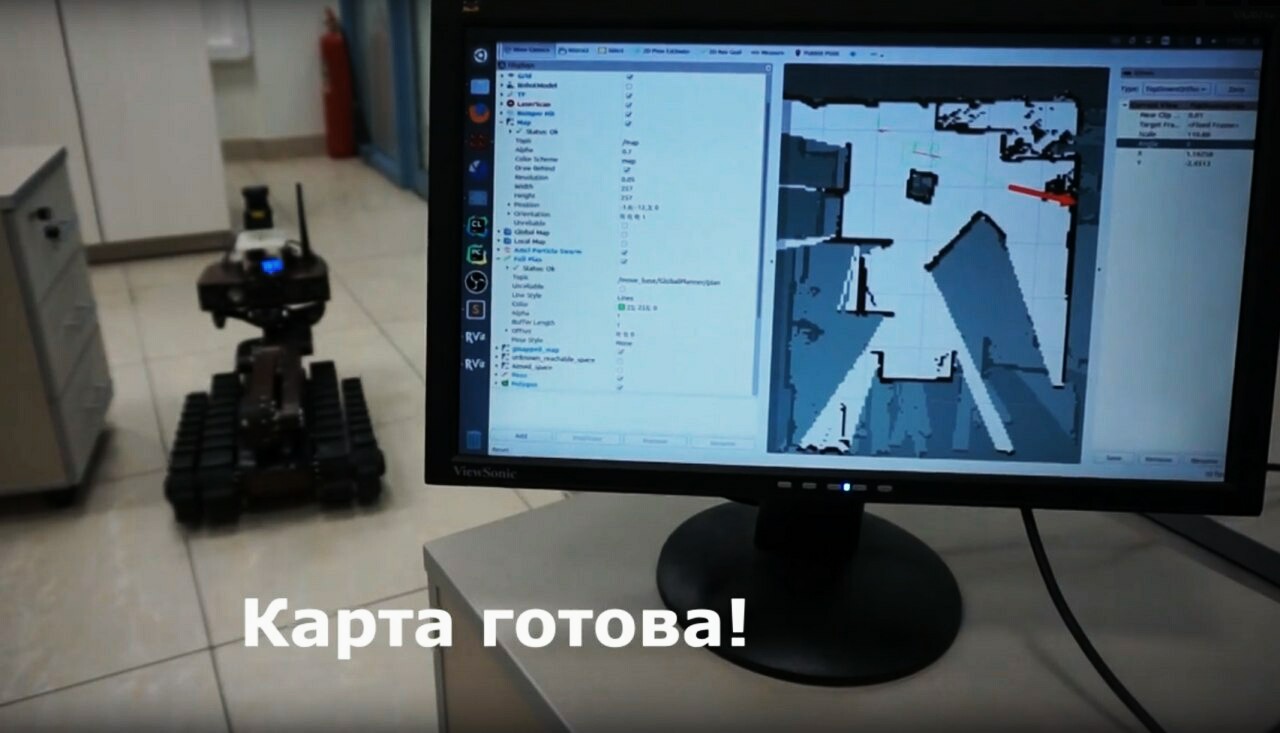
Команда Лаборатории интеллектуальных робототехнических систем (ЛИРС) Высшей школы ИТИС КФУ представила новую прикладную разработку – программное обеспечение на базе Робототехнической операционной системы ROS, с помощью которого российский робот «Сервосила Инженер» изучает местность вокруг себя, используя лазерный дальномер Hokuyo. В режиме реального времени робот передает все собранные данные на компьютер оператора. Затем, на основе обновленной карты, робот самостоятельно строит маршрут к цели, выбранной оператором. Робот учитывает свои размеры и новые препятствия, которые обнаруживает во время движения. При необходимости робот автоматически перестраивает свой маршрут. Закончив фазу планирования маршрута, робот преобразует готовый маршрут в команды для своих двигателей, используя разработанное в лаборатории программное обеспечение.
Следующая задача – обеспечить полную автономность робота при создании карты с интеграцией нового алгоритма оптимального исследования неизвестных областей карты, разработанного командой ЛИРС. Данная разработка будет применяться службами спасения, службами безопасности на опасных производствах, при разведке и эксплуатации туннелей и шахт и др.
Наземный беспилотный робот «Инженер» создан российской компанией Сервосила. По сравнению со своими аналогами он герметичен, имеет малую массу и может переноситься в рюкзаке одним человеком. Это позволяет использовать робота в труднодоступных местах, во время боевых действий и при ликвидации последствий стихийных бедствий, когда перевозка робота грузовым автотранспортом затруднена.
Видео можно посмотреть ВКонтакте и Youtube.
Следите за новостями ВКонтакте @lirs_kfu (ЛИРС Робототехника/LIRS Robotics) !
Также новость на сайте КФУ