Robots
|
|
Mobile robot crawler Servosila Engineer Developed by Russian company Servosila for rescue activities in the facilities of natural and man-made disasters, mine neutralization and other technical works. LIRS team use this robot in the projects and also students work with it to pursue their master's thesis on rescue robotics topics. |
 |
Robocar Unior The project of Russian company AVRORA ROBOTICS is an educational and methodological complex for the development of skills in self-driving car development. |
 |
Mobile wheeled robot PMB 2 Designed by Spanish company Pal Robotics. It is made for indoor use and human-robot interaction studies. |
|
|
Industrial robots KR 3 AGILUS Provide maximum performance per square meter. From any position, at any time and in any installation position, the KR 3 AGILUS provides flexible and efficient automation. |
|
|
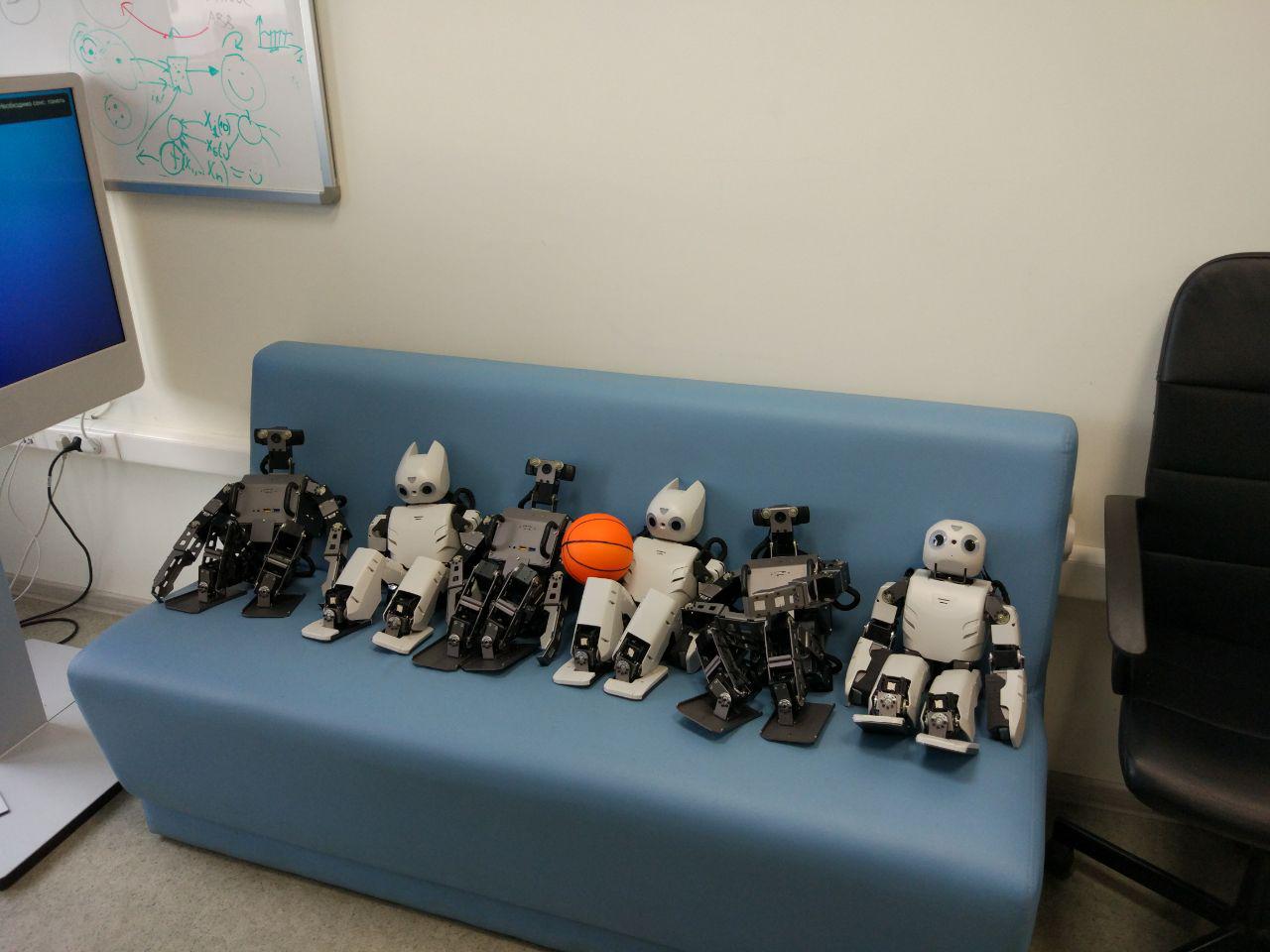
Humanoid robots ROBOTIS OP2 and OP3 ROBOTIS OP2 has advanced computational power, sophisticated sensors, high payload capacity, and dynamic motion ability to enable many exciting research, education and outreach activities. ROBOTIS OP3. The company replaced MX-28 drive with the XM-430 model. Also, this model allows to modify the body of the robot on a 3D printer. |
 |
Quadcopters DJI Phantom 4 Pro Phantom 4 Pro comes with 30 minutes of flying time. It can record at up to 4K, but its maximum bitrate is 100Mbps. |
 |
Quadcopter ĐŐ4 The drone was assembled by our colleagues from the Bryansk State Technical University. This drone has open source software and flexible hardware which allows modify it directly, add sensors, replace components. This model allows you to modify the robot case on a 3D printer. |
|
|
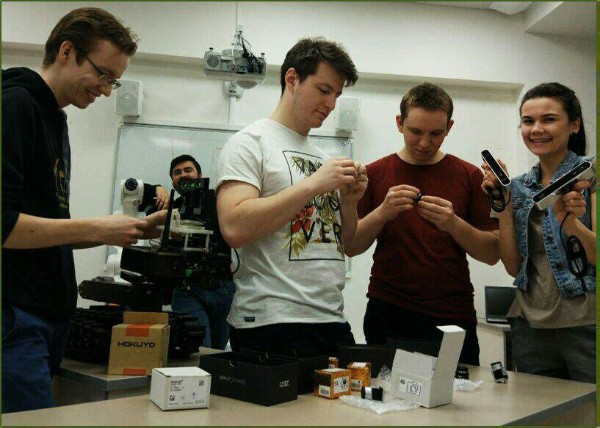
Sensors, Cameras etc. Laser range finders, sensor cameras, Stereo Zed camera sensors, digital mono cameras, etc. |
|
|
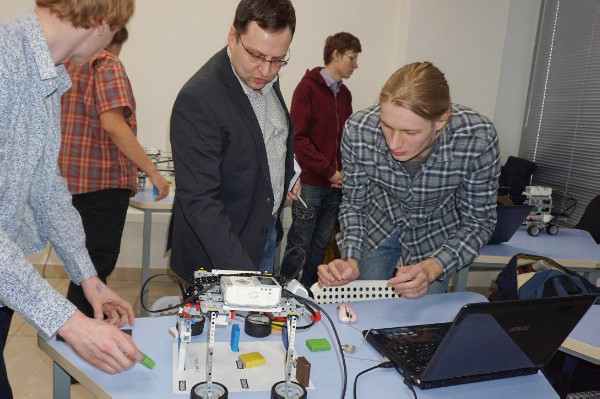
LEGO LEGO EV3 Sets are used by students within the frames of such classes as Introduvtion to Robotics, Introduction to Inductrial Manipulators, Fundamentals fo Robotics and Mobile Robotic Systems. Where the students learn path planning and navigation algorithms for mobile robots, direct and inverse kinematics, principles of simple sensors operation and solving simple applied engineering problems. |