Search and rescue robotics
Fig. 1
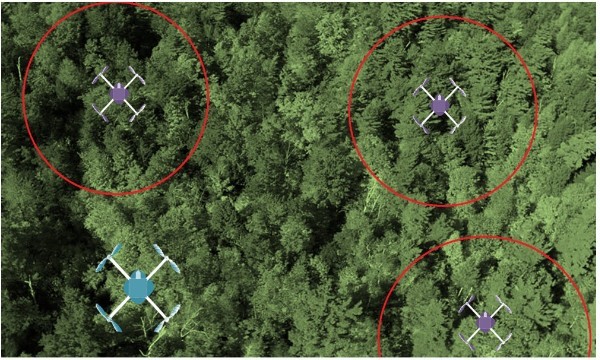
This project is aimed at theoretical and experimental research of tasks arising from robotic search and rescue operations. Depending on the specifics of the tasks, it is necessary to use different types of robots or combined heterogeneous groups of robots. For example:
Fig. 2

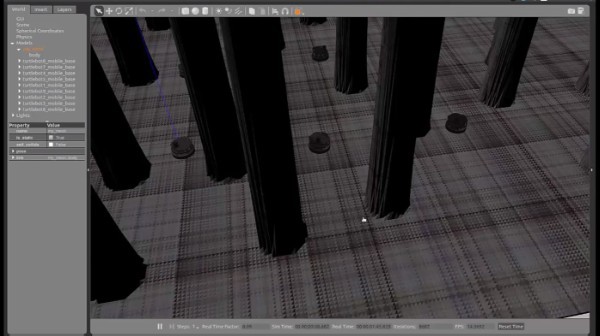
The aim of our study is to develop and implement on real-world robots the protocols and algorithms for working together a group of robots for search and rescue tasks, as well as for the task of planning the path of robots in a complex environment with many obstacles, and no GPS\ Glonass signal . The result of our research will allow optimal use of the capabilities of an autonomous group of low-cost rapid-deployment robots in search and rescue scenarios.
Video 1
Search and Rescue in the Forest
Video 2
Interview of Professor Evgeny Magid, Head of the Laboratory of Intelligent Robotic Systems at the ITIS KFU High School, about search and rescue robots (Source: Postnauka)

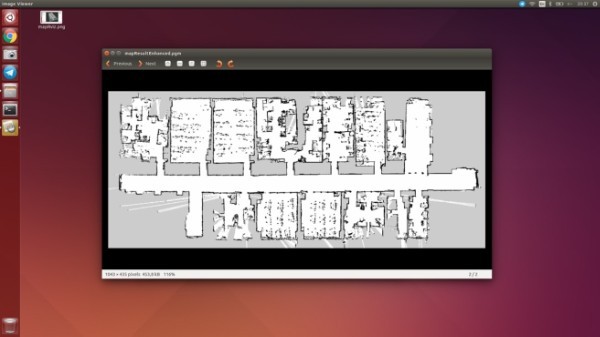
The team of the Laboratory of Intelligent Robotic Systems (LIRS) of the Higher Institute ITIS KFU presented a new applied development - software based on the ROS (robotic operating system), with the help of which the Russian robot Servosila Engineer observes the terrain around itself using the Hokuyo laser rangefinder. Figure 3 shows a map of the 14th floor of the 2nd building of the KFU, which the robot Servo Engineer built automatically.
Fig.3
Video 3
The following video describes how the robot builds the map.
Source of information: Laboratory of Intelligent Robotic Systems