Проект программы «Приоритет 2030» (2022-2025)
Регистрационный номер проекта в ЕГИСУ НИОКТР:
122071900011-6 (2023), 124111300003-8 (2024), 125091010200-5 (2025)
Руководитель проекта: профессор Магид Евгений Аркадьевич
Целью научного исследования является разработка концепций, методов, алгоритмов и конкретных технологий на стыке медицины, Интернета вещей (IoT) и робототехники, которые в перспективе позволят создать на базе Университетской клиники Казанского федерального университета роботизированную «умную больницу». Идея исследования появилась, когда в РФ пришел COVID-19; в Республике Татарстан часть обычных больниц была оперативно превращена в ковидные госпитали, а контагиозность заболевания потребовала сократить до минимума количество контактов между людьми. После изучения ответов ведущих ученых в области робототехники на катастрофическую эпидемию стало очевидно, что только комплексная роботизация здравоохранения сможет существенно повысить безопасность и понизить смертность среди пациентов и персонала во время эпидемиологических катаклизмов, а также позволит снизить повседневную нагрузку на младший медицинский и вспомогательный персонал больниц [1]. Комплексная роботизация медицинского учреждения предполагает создание и интеграцию в единую систему роботов-сопровождающих, роботов-дезинфекторов, роботов для мониторинга здоровья пациентов, роботов-доставщиков (лекарств, еды, постельного белья, отходов), роботов-медсестер, социальных роботов и роботов-информаторов, умных инвалидных колясок и умных медицинских койек, IoT-систем камер и датчиков, систем безопасности и контроля доступа, и других [2,3].
В рамках исследования предложена общая концепция роботизированной «умной больницы» и создана виртуальная модель отделения нейрореабилитации МСЧ КФУ для тестирования концепции в компьютерном симуляторе (виртуальная модель построена по чертежам здания и результатам собственных замеров на месте).

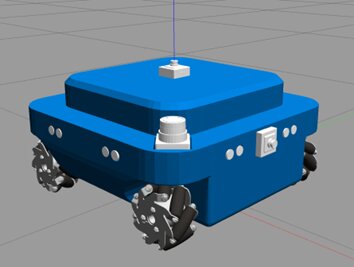
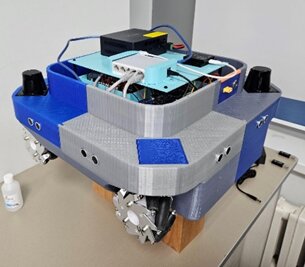
Разработана концепция системы управления группой роботов в «умной больнице», концепция системы контроля доступа в помещения больницы, правила поведения роботов. Разработаны конструкции нового торсового [4,5,6] и гибридного мобильных роботов [7]. Разработаны конструкции двух новых мобильных роботов («АртБул-2» и «АртБул-3») для выполнения функций сопровождения и доставки; созданы виртуальные модели этих мобильных роботов; один робот «АртБул-2» полностью собран, для него написано и протестировано базовое программное обеспечение [8].
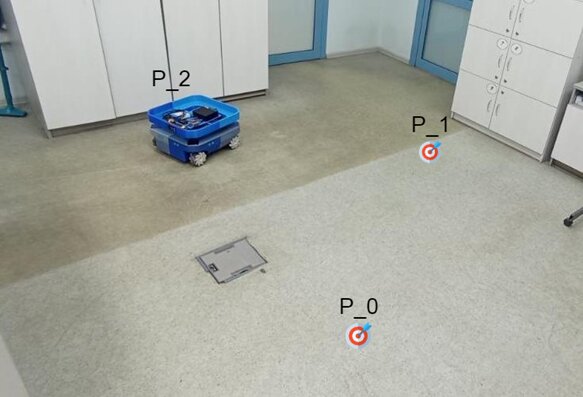
Разработан прототип программного обеспечения с графическим интерфейсом для управления «умной больницей», который позволяет ставить роботам различные задачи в «умной больнице» и управлять ими в режиме реального времени.
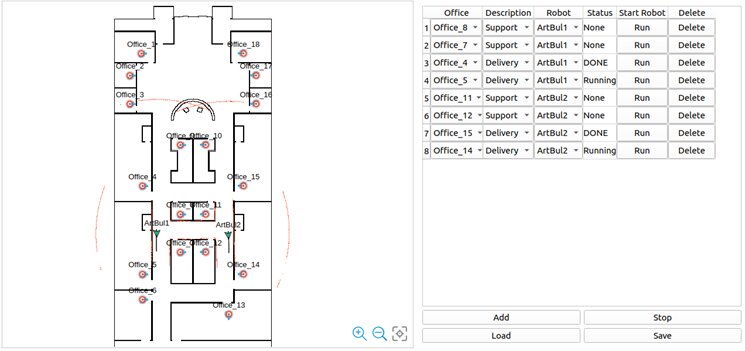
Прототип протестирован в компьютерном симуляторе и с реальными роботами «АртБул-2» и TyagoBase [9, 10].

Изучены возможности использования отдельных беспилотных летательных аппаратов (БЛА) [11] и их групп [12,13,14] для доставки малогабаритных грузов между корпусами больницы, влияние освещения на локализацию роботов при перемешении [15], влияние взаимодействия с человеком на выполнение задачи автономного обхода препятствий роботом [16]. Разработано программное обеспечение для алгоритмов локальной [14,17,18] и гибридной [19] навигации внутри больницы, для создания сред для тестирования алгоритмов [20], [12] [12]
Полученные результаты были описаны в серии научных статей, представленных на профильных конференциях по робототехнике и опубликованных в международных журналах; 11 технологических решений было зафиксировано в виде государственной регистрации программ ЭВМ.
Статьи
[1] Magid E., Zakiev A., Tsoy T., Lavrenov R., Rizvanov A. Automating pandemic mitigation // Advanced Robotics. – 2021. – Vol. 35 (9). – p. 572-589.
[2] Safin R., Lavrenov R., Tsoy T., Magid E., Svinin M., Roy S.D., Saha S.K. Prioritizing tasks within a robotic transportation system for a smart hospital environment // Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics). – 2021. – № 12998. – p. 182-193.
[3] Safin R., Lavrenov R., Hsia K.-H., Maslak E., Schiefermeier-Mach N., Magid E. Modelling a TurtleBot3 Based Delivery System for a Smart Hospital in Gazebo // The 15th Siberian Conference on Control and Communications (SIBCON 2021) (Kazan, Russia; 13-15 May 2021) (online) – 2021. – № 9438875.
[4] Sulaiman, S., Sudheer, A. P., Mohan, S., Magid, E. (2025). Manipulability Analysis of a Tree Type Humanoid Upper-Body Robot with Dual Redundant Arms. Scientia Iranica, 32(2).
[5] Sulaiman, S., Sudheer, A. P., Magid, E. (2024). Feed-forward Controller Using DeNOC Methodology for a Wheeled Humanoid Robot. Lobachevskii Journal of Mathematics, 45(4), 1748-1761.
[6] Sulaiman, S., Sudheer, A. P., Magid, E. (2024). Torque control of a wheeled humanoid robot with dual redundant arms. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 238(2), p. 252-271.
[7] Sulaiman, S., Pillai, A., Imamov, N., Magid, E. (2025). Development of a Leg-Wheel Quadruped Robot. Mekhatronika, Avtomatizatsiya, Upravlenie, 26(11), pp. 588-593.
[8] Apurin, A., Abbyasov, B., Dobrokvashina, A., Bai, Y., Svinin, M., Magid, E. (2023). Omniwheel Chassis' Model and Plugin for Gazebo Simulator. International Conference on Artificial Life and Robotics (ICAROB 2023), pp. 170-173.
[9] Gataullin, R., Abbyasov, B., Zhukova, V., Martinez-Garcia, E.A., Magid, E. (2025). A Graphical User Interface for Controlling a Group of Service Mobile Robots. CIT&DS 2025: Creativity in Intelligent Technologies & Data Science. Communications in Computer and Information Science, Vol. 2803. Springer, Cham.
[10] PAL Robotics. – URL: https://pal-robotics.com/
[11] Imamov, N., Abbyasov, B., Tsoy, T., Martinez-Garcia, E.A., Magid, E. (2024). Evaluation of a Weather Plugin in Gazebo: A Case-Study of a Wind Influence on PX4-Based UAV Performance. International Conference on Interactive Collaborative Robotics, Cham : Springer Nature Switzerland, pp. 344-356.
[12] Frolov, O., Safin, R., Tsoy, T., Martinez-Garcia, E.A., Magid, E. (2025). Formation Control of Unmanned Aerial Vehicle Swarms for Outdoor Monitoring in Search and Rescue Tasks. Uchenye Zapiski Kazanskogo Universiteta. Seriya Fiziko-Matematicheskie Nauki, Vol. 167, Iss. 4, pp. 786-805.
[13] Vaschenko, A., Frolov, O., Safin, R., Tsoy, T., Martinez-Garcia, E.A., Magid, E. (2024). UAV swarm control with operator-leader-followers approach. 16th International Conference "Intelligent Systems" 2024 (INTELS'2024), Vol 2603, pp. 311-324. Springer, Cham.
[14] Frolov, O., Safin, R., Tsoy, T., Martinez-Garcia, E. A., Magid, E. (2024). UAV Swarm Formation Control for Outdoor Surveillance Tasks. 8th International Conference on Computing, Control and Industrial Engineering 2024 (CCIE). Lecture Notes in Electrical Engineering, vol. 1252 (pp. 364-372). Springer, Singapore.
[15] Sultanov, R., Safin, R., Martinez-Garcia, E.A., Magid, E. (2024). Modeling Sunlight in Gazebo for Vision-Based Applications Under Varying Light Conditions. In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics - Volume 1: ICINCO, pp. 519-526.
[16] Salman, R., Sulaiman, S., Islamova, R., Tsoy, T. (2024). An investigation on the impact of human-robot interactions during an autonomous obstacle avoidance task. International Conference on Artificial Life and Robotics (ICAROB 2024), Vol.29, pp. 300-303.
[17] Mishenin, R. M., Eryomin, A. E., Tsoy, T. G., Magid, E. A. (2024). CautiousBug path planning algorithm package for ROS Noetic. International Conference on Information, Control, and Communication Technologies (ICCT 2024), pp. 184-186.
[18] Mavrin, I., Tsoy, T., Magid, E. (2022, May). Modified E3 exploration algorithm for unknown environments with obstacles. - IEEE, 2022. - 13th Asian Control Conference (ASCC), pp. 1413-1418.
[19] Sulaiman, S., Sudheer, A.P., Magid, E. (2024). A Comparison of Different Hybrid Path Planning Algorithms for a Mobile Platform. The 4th International Conference on Computer, Control and Robotics (ICCCR 2024), pp. 269-273.
[20] Gabdrahmanov, R., Tsoy, T., Martinez-Garcia, E.A., Magid, E. (2024). A Tool for Mass Generation of Random Step Environment Models with User-Defined Landscape Features. In Proceedings of the 21st International Conference on Informatics in Control, Automation and Robotics - Volume 1: ICINCO, pp. 511-518.
[21] Lychko S., Tsoy T., Li H., Martinez-Garcia E., Magid E. ROS network security for a swing doors automation in a robotized hospital // Siberian Conference on Control and Communications (SIBCON 2022) (online, 17-19 November 2022) – p. 1-6.
[22] Talanov M. et al. Neuropunk Revolution. Hacking Cognitive Systems towards Cyborgs 3.0 // International Journal of Unconventional Computing. – 2023. – pp. 145-201.
[23] Mikhailova Y. Neurointerface with oscillator motifs for inhibitory effect over antagonist muscles / A. Pozdeeva, A. Suleimanova, A. Leukhin, A. Toschev, T. Lukmanov, E. Fatyhova, E. Magid, I. Lavrov, M. Talanov // Frontiers in Neuroscience. – 2023. – Vol. 17. – pp. 1-9.
[24] Abbyasov B., Zagirov A., Gamberov T., Li H., Magid E. Vision-based autonomous navigation for medical examination using a UR3e manipulator // International Conference on Artificial Life and Robotics (ICAROB 2024). – 2024. – Vol.29. – pp. 308-311.
[25] Аббясов Б. Р., Магид Е. А. Концепция автономной навигации манипулятора UR3e с использованием камеры глубины Kinect для диагностического исследования пациента // XIV Всероссийское совещание по проблемам управления : сборник научных трудов, Москва, 17-20 июня 2024. – М. : Институт проблем управления им. В.А. Трапезникова, 2024. – С. 1122-1125.
[26] Salman R., Sulaiman S., Islamova R., Tsoy T. An investigation on the impact of human-robot interactions during an autonomous obstacle avoidance task // International Conference on Artificial Life and Robotics (ICAROB 2024). – 2024. – Vol.29. – pp. 300-303.
[27] Alexeev A., Tsoy T., Martinez-Garcia E. A., Magid E. An Overview of Kinect Based Gesture Recognition Methods // International Conference on Artificial Life and Robotics (ICAROB 2024). – 2024. – Vol.29. – pp. 295-299.
[28] Nekerov, I.A., Safin, R.N., Tsoy, T.G., Sulaiman, S., Martinez-Garcia, E., Magid, E.A. (2025). ROS-based navigation in unknown environment using the InsertBug algorithm: Issues of practical usage. Uchenye Zapiski Kazanskogo Universiteta. Seriya Fiziko-Matematicheskie Nauki, 167(1), pp. 38-53.
[29] Vaschenko, A., Frolov, O., Safin, R., Tsoy, T., Martinez-Garcia, E.A., Magid, E. (2024). UAV swarm control with operator-leader-followers approach. 16th International Conference "Intelligent Systems" 2024 (INTELS'2024), Vol 2603, pp. 311-324. Springer, Cham.