Full project name: Development of a control system for robotic laparoscopic instrument for autonomous stitching
According to statistics from the Ministry of Health, in Russia today there is large shortage of experienced specialists, including surgeons, who are particularly disastrous in remote rural areas. Successful development of surgical robots will allow to partially solve this problem and will be an essential step towards the automation of medical services leading to future personalized medicine. Therefore, the creation of automated surgical systems is one of the most important and promising areas of development of robotics in the field of medicine as part of the transition to high-tech healthcare.
Laparoscopic (minimally invasive) surgery, compared with open surgery, is a more cost-effective and safe alternative that provides quick recovery after surgery, significantly reduces the incidence of complications and minimizes the cosmetic defect of the skin. At the same time, laparoscopic surgery has spatial, motor and haptic limitations, which ultimately significantly limit the successful actions of the surgeon to his experience and ability to perform the operation accurately and efficiently. Surgeons work with long, rigid surgical instruments through trocars that limit the procedure to four degrees of freedom. For visual feedback, surgeons focus on a two-dimensional endoscopic camera with no depth information. As a result, these problems cause difficulties for insufficiently experienced surgeons to perform the basic tasks of suturing, including operations on tying knots, sewing and dissecting tissues.
In the role of the first step towards automation of laparoscopic operations, this project focuses on the automation of the suturing procedure. A certain level of autonomy of the robotic surgical system will help to relieve the surgeon from tedious repetitive monotonous tasks, using such advantages of the robot as high dexterity and accuracy of movements. To achieve a completely autonomous suturing (including laparoscopic sutures) using a surgical robot, in addition to the complexity of implementing the control system itself in an autonomous or semi-autonomous mode, additional difficulties arise due to the presence of deformation of human tissue. As part of our project, the first prototype of an autonomous control system of a surgical manipulator will be developed and verified to automate the suturing procedure in dynamic conditions, taking into account the type of fabric for stitching. The control algorithms of a robotic laparoscopic instrument for autonomous stitching of tissues will be developed, including a model of working with soft (deformable) tissue, models of various types of stitches and planning the movement of the manipulator. Route planning will be carried out taking into account the kinematic limitations of laparoscopic surgery, and the integration of stereo camera data and power-moment sensors will allow determining the type of tissue to be stapled based on machine learning.
Publications of the 1st stage of the Project:
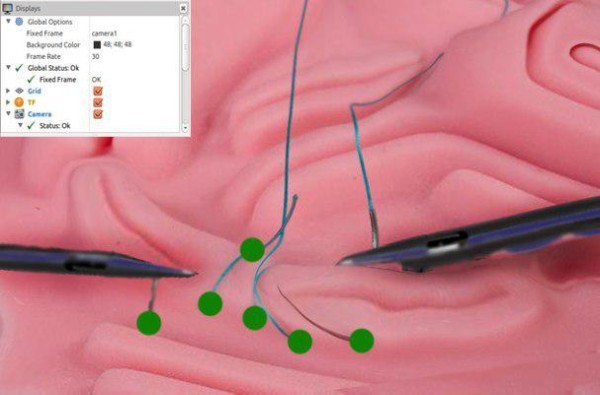
1. Artur Sagitov, Tatyana Tsoy, Hongbing Li, Evgeni Magid “Automated open wound suturing: detection and planning algorithm”, Journal of Robotics, Networking and Artificial Life – 2018, Volume 5, Issue 2, September 2018, pp. 144 – 148. Журнал индексируется в БД Web of Science. Ссылка: https://www.atlantis-press.com/journals/jrnal/25902062
2. Сагитов А.Г., Цой Т.Г., Шабалина К.С., Лавренов Р.О, Магид Е.А. «О виртуальном моделировании тканей и швов для хирургических роботов в среде Gazebo», сборник трудов научно-технической конференции по итогам совместного конкурса фундаментальных исследований РФФИ - РТ в 2018 г., г. Казань, 22.11.2018.
3. Artur Sagitov, Hongbing Li, Natalia Schiefermeier-Mach, Evgeni Magid “Extending Gazebo simulator for surgical robotics: tissue and suture modeling”, International Conference on Artificial Life and Robotics (ICAROB 2019). (Находится в печати).
4. Bulat Khabibrakhmanov, Artur Sagitov, Evgeni Magid. “Autonomous robotic palpation of soft tissue using kuka iiwa robot”, Симпозиум «Фундаментальная наука и новейшие технологии для устойчивого развития в XXI веке» (англ. «Fundamental Science and Emergent Technologies for the Sustainable Development in XXI Century», на Рис.8 полностью представлен постер).
Publications of the 2d stage of the Project:
1. Sagitov A., Li H., Schiefermeier-Mach N., Magid E. “Extending Gazebo simulator for surgical robotics: tissue and suture modeling”, International Conference on Artificial Life and Robotics (ICAROB 2019), p. 124-127. DOI: 10.5954/ICAROB.2019.OS4-5, ISBN: 978-4-9908350-4-0.
2. Sagitov A., Gavrilova L., Tsoy T., Hongbin L. Design of simple one-arm surgical robot for minimally invasive surgery // The 12th International Conference on the Developments in eSystems Engineering (Kazan, Russia; 7-10 October 2019). (Статья принята к публикации, состоялось выступление с докладом в рамках конференции, статья находится в печати).
3. Shafikov A., Sagitov A., Li H., Schiefermeier-Mach N., Magid E. “Robotic Palpation Modeling for KUKA LBR IIWA Using Gazebo Simulator”, International Conference on Artificial Life and Robotics (ICAROB 2020). (Статья принята к публикации и находится в печати, выступление с докладом в рамках конференции состоится 14 января 2020 года).