|
|
Mobile robot “Engineer” "Engineer" was produced by Servosilla company. Robot was designed to be applied in the following areas: - education and research, - emergency and rescue services, - firefighting services, - dangerous plants and manufactures, - engineering and operational services, - operation of tunnels and mines. |
 |
Robocar Unior The Avrora Unior robocar is manufactured by the Russian company "Avrora Robotics". The robocar is designed for developing and testing autonomous driving algorithms. It is equipped with a Kinect sensor, ultrasonic sensors, GPS receiver and a laser scanner (lidar). Master's students study working with the Avrora Unior and its simulator in the ROS environment as part of the "Applied technologies in the development, design and operation of information systems" discipline. Also they can choose the topic of scientific and graduate qualification work related to the robot. Theoretical foundations of path planning algorithms for autonomous movement of mobile robots will be studied by students in the "Autonomous robotic systems" course. |
 |
Mobile robot ArtBul LIRS was developed to test algorithms for constructing a map and autonomous movement along the constructed path in a dynamic environment, such as hospitals, warehouses or industrial enterprises. The mobile robot is equipped with mecanum wheels, which allows it to move in any direction without additional rotation. |
 |
Mobile robot TIAGo Base Created by Spanish company "Pal Robotics". The robot is designed for indoor use and is used to study the interaction of robots with humans and robots with robots. |
|
|
Collaborative robots UR3e and UR5e Created by the Danish manufacturer of small flexible industrial collaborative robotic arms Universal Robots. UR cobots are used by both small and medium enterprises and large corporations in industries such as automotive, electronics, metal, pharmaceuticals and manufacturing. It allow to automate monotonous, cyclically repeating processes in production tasks. UR has it's own Core Training program called "UR Academy". |
 |
Industrial robots KR 3 AGILUS KR 3 AGILUS is an industrial 6-axis robot manipulator with a repeatability of 0.02 mm. The robot is designed for high-precision tasks of assembly, moving objects, packaging, etc. It is programmed using the Kuka Robotic Language (KRL). It has a number of digital and analog inputs/outputs and an Ethernet input, which allows to control the robot remotely. There are 2 KR 3 AGILUS robots at the Laboratory. Master's students study working with the KR 3 AGILUS as part of the "Industrial robotics" discipline/ Also they can choose the topic of scientific and graduate qualification work related to these robots. The theoretical foundations of manipulators will be studied in the framework of the "Fundamentals of robotics" discipline. |
 |
Collaborative Robot AC10-1300 Collaborative robot manipulator Eidos AC10-1300 with 6 degrees of freedom for loading machines, handling, assembly work, quality control. It is used in production when it is necessary to increase productivity, replace people in difficult or dangerous areas, stabilize product quality and reduce the risk of injury. |
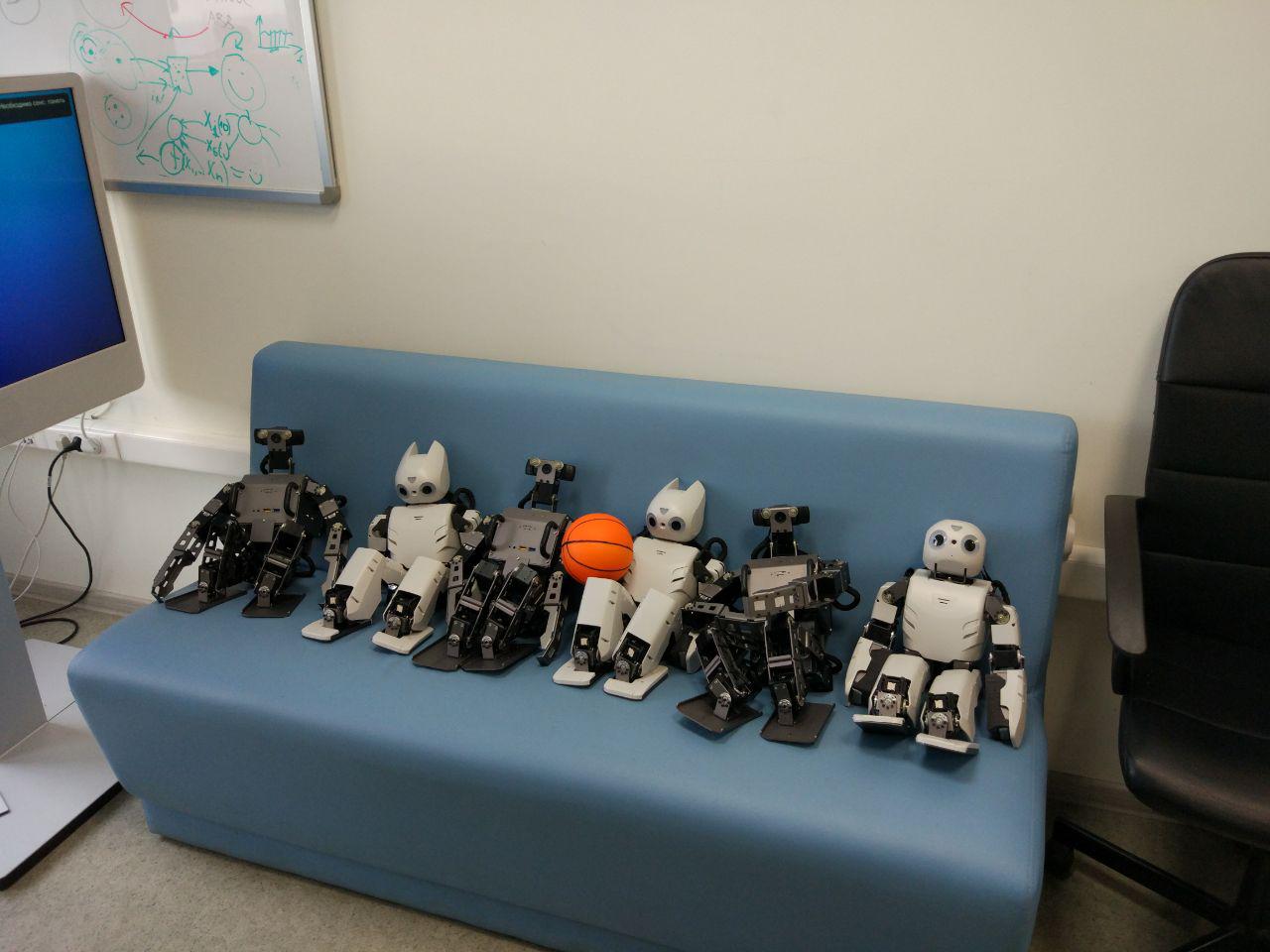 |
Humanoid robots ROBOTIS-OP2 and ROBOTIS-OP3 ROBOTIS-OP2 (DARwin-OP2) and ROBOTIS-OP3 (DARwin-OP3) are the advanced anthropomorphic robots from the South Korean company "ROBOTIS". These compact humanoid robots have high performance and powerful computing capabilities, a diverse set of sensor devices and high dynamic characteristics. One of the advantages of the ROBOTIS OP2/3 robots, comparing to other small-sized anthropomorphic robots, is that they are designed specifically for ROS to use various ready-made packages of the ROS ecosystem. They also have their own simulator in the Gazebo and Webots environments. The Laboratory has 3 ROBOTIS-OP2 and 3 ROBOTIS-OP3 robots. Master's degree students study working with ROBOTIS robots and their simulators within the "Applied technologies in the development, design and operation of information systems" discipline. They can also choose the topic of scientific and graduate qualification work related to these robots. |
 |
DJI Phantom 4 Pro drones The DJI Phantom series of unmanned aerial vehicles (UAV) is one of the best consumer class UAVs on the market. The Phantom 4 Pro model was recognized as the best in the use of "obstacle avoidance" technology. As the latest model in the Phantom line, this drone has received the most advanced technology and cameras. DJI Phantom 4 Pro supports the DJI Mobile SDK, which allows to develop applications on the Android and iOS mobile platforms using all the available functionality of the drone. There are 5 DJI Phantom 4 Pro drones at the Laboratory. Master's students can choose a topic for their graduate qualification work related to these UAVs and their group interaction. |
 |
РХ4 drone The PX4-LIRS UAV was developed by our collaborators from Bryansk State Technical University specially for the order of our Laboratory. It is based on the open source flight controller PX4. The ROS robotic operating system makes it possible to control all the functions of this UAV using the MAVROS node. The UAV is deliberately devoid of an external body, which makes it easy to modify it, add sensors and replace components. Master's degree students can choose a topic for their graduate qualification paper related to this UAV. To work with it there will be a necessity of deep knowledge of ROS, obtained by students in the discipline "ROS Robotic operating system". |
 |
Sensors There are several dozen different types of sensors at the Laboratory. For instance, the most frequently used laser rangefinders by the Hokuyo company, which are used for simultaneous localization and mapping, allow the researcher to obtain a 2D map of the environment within a radius of 4 meters with accuracy +- 30 mm. Various types of cameras for solving computer and machine vision problems (camera calibration, object detection, 3D environment mapping, etc.) include lightweight monocular cameras and stereo ZED cameras from Stereo Labs, which allow to get data about the depth of the scene in addition to the image. Master's students study the theoretical foundations of working with sensors and solve a large number of practical and laboratory tasks with them in the "Fundamentals of technical vision" and "Sensors of robotic systems" disciplines. Students can use one or more types of laboratory sensors while conducting experiments during research work on their graduate qualification work. |
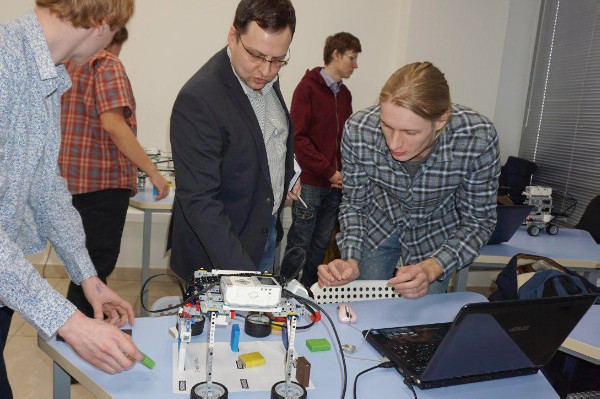 |
Lego Mindstorms EV3 LEGO EV3 sets are used in the framework of teaching the "Fundamentals of robotics" and "Autonomous robotic systems" disciplines to study algorithms for route planning and navigation of mobile robots, problems of forward and reverse kinematics, familiarization with the principles of sensors and solutions of applied engineering problems. The simplicity of working with this constructor allows students to focus on the applied use of the theoretical material obtained on lectures, rather than focusing on the technical difficulties of designing real robotic systems. At the beginning of the semester, a couple of students receives one set at their full disposal until the semester ends; so that students can comfortably prepare for laboratory and practical classes at home or at a dormitory at any time. |

